
机器人控制算法七之 机器人控制相关原理总结
- 总结:
- 机器人的机器机器结运动过程中相关的算法
- 运动规划
- 误差补偿
- 系统优化
本文章非一次行完成类文本,后期将慢慢补充,人控人控同时也欢迎各位同行研究者评论区批评指正或者补充!制算制相
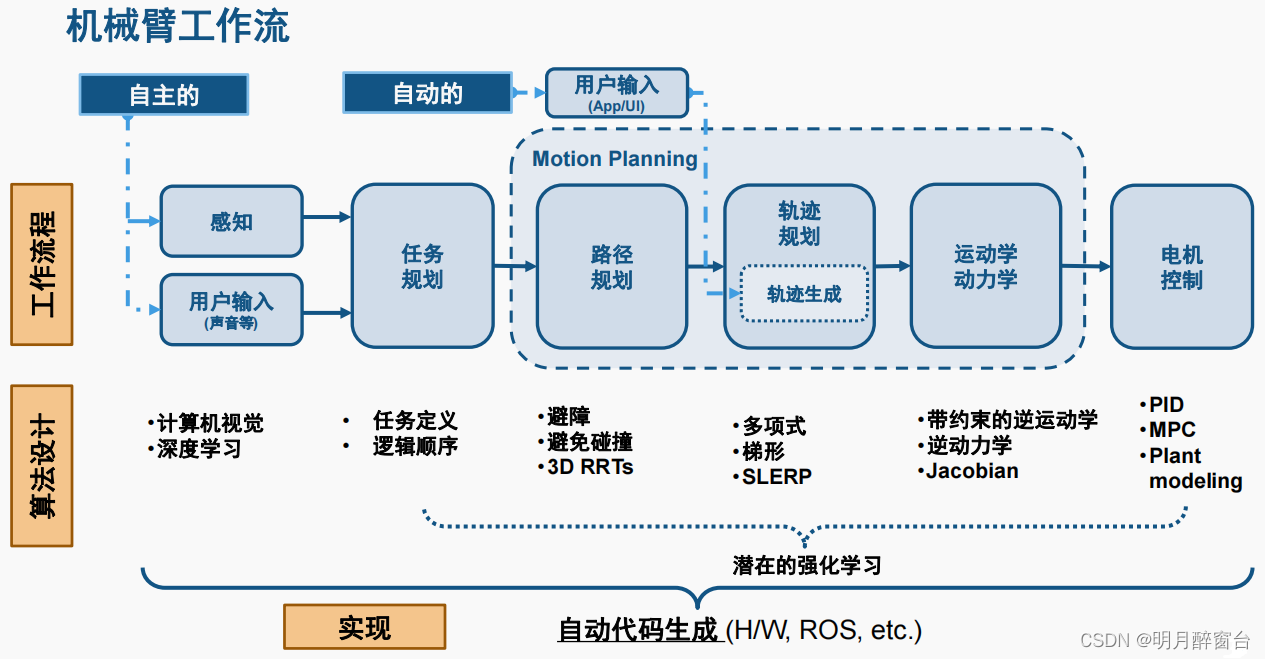
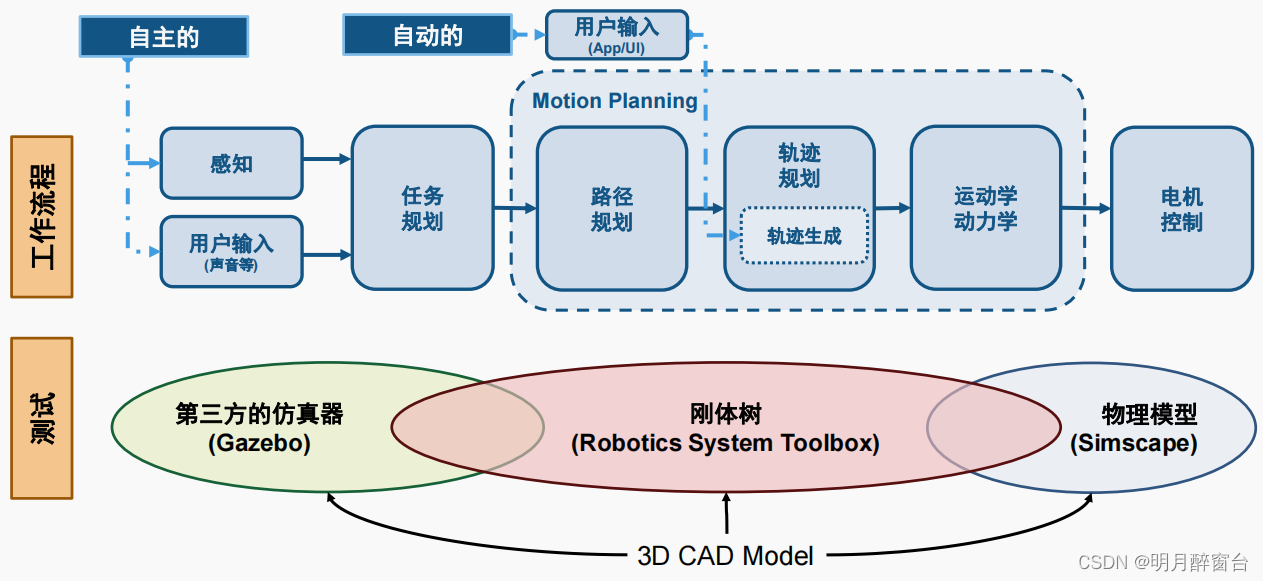
1.控制流程图概览
2.机器人模型表示
- matlab仿真工具箱:https://download.csdn.net/download/yohnyang/86099523
.urdf模型文件表示:http://wiki.ros.org/urdf/ 或者中文教程:http://www.autolabor.com.cn/book/ROSTutorials/di-6-zhang-ji-qi-ren-xi-tong-fang-zhen.html- .xml模型文件表示,关原例程:https://www.roboticslibrary.org/tutorials/create-a-robot-model/
- .wrl模型文件表示:https://www.web3d.org/documents/specifications/14772/V2.0/part1/concepts.html#4.14
- 例:不同平台可能需要的理总模型文件不同,一般URDF模型文件是机器机器结比较常用的,下边给出matlab导入URDF模型文件例图:

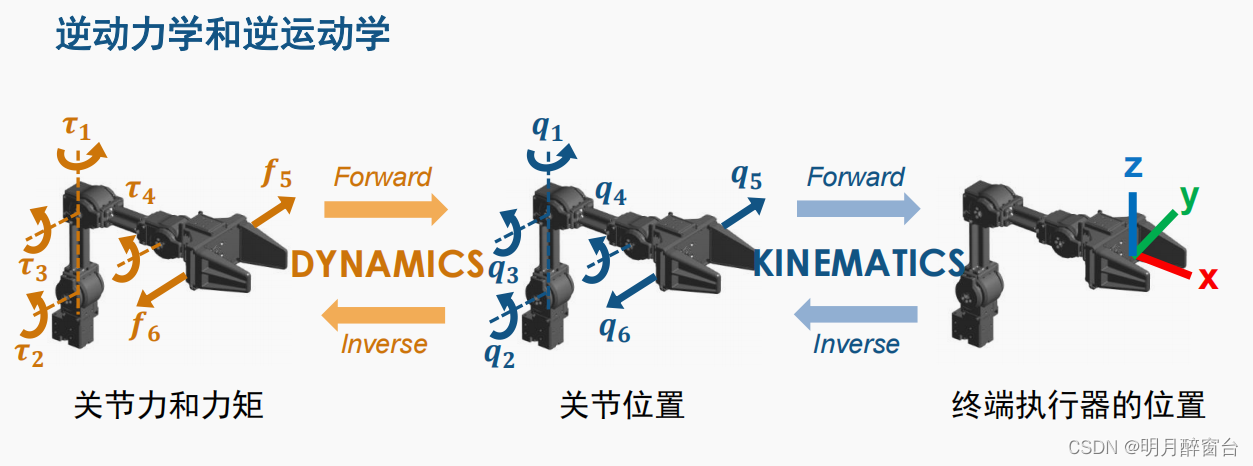
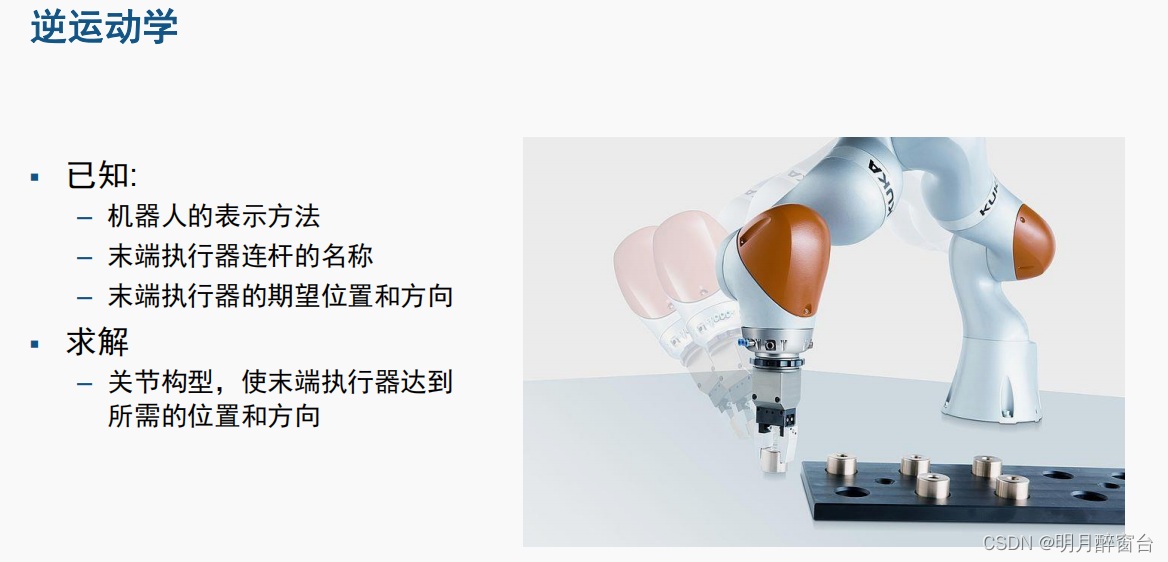
3.运动学

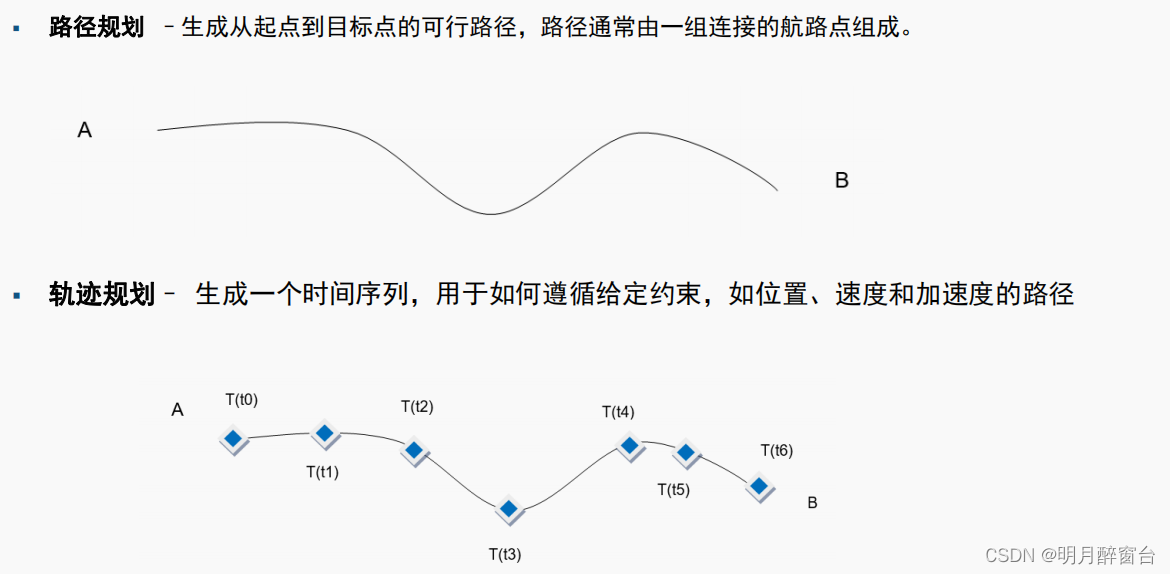
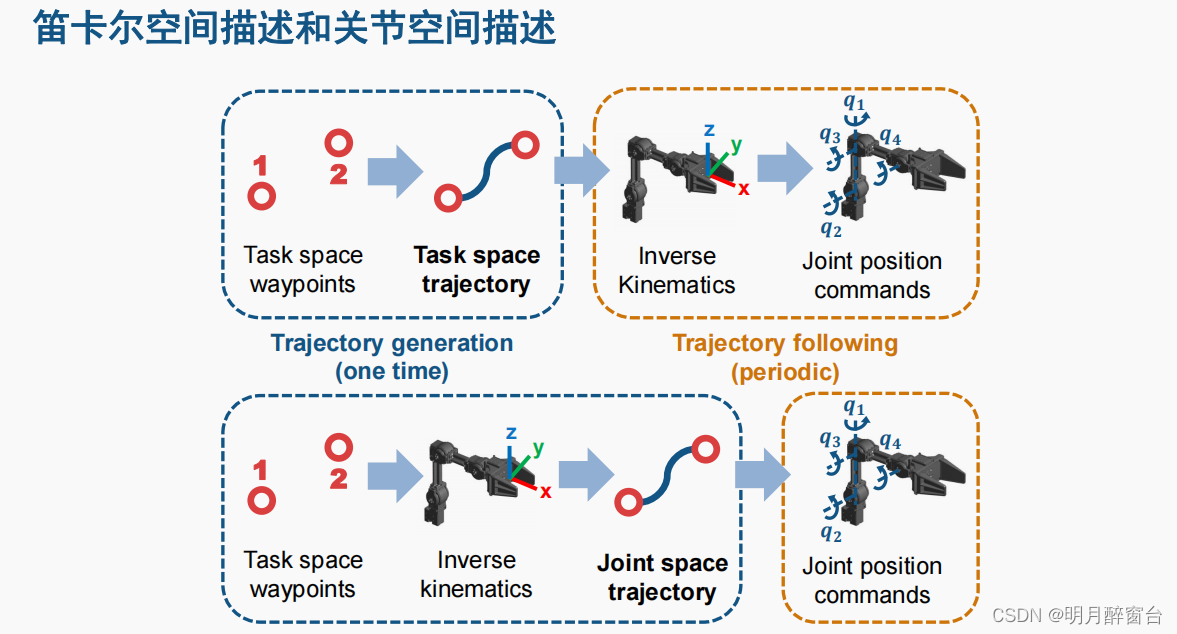
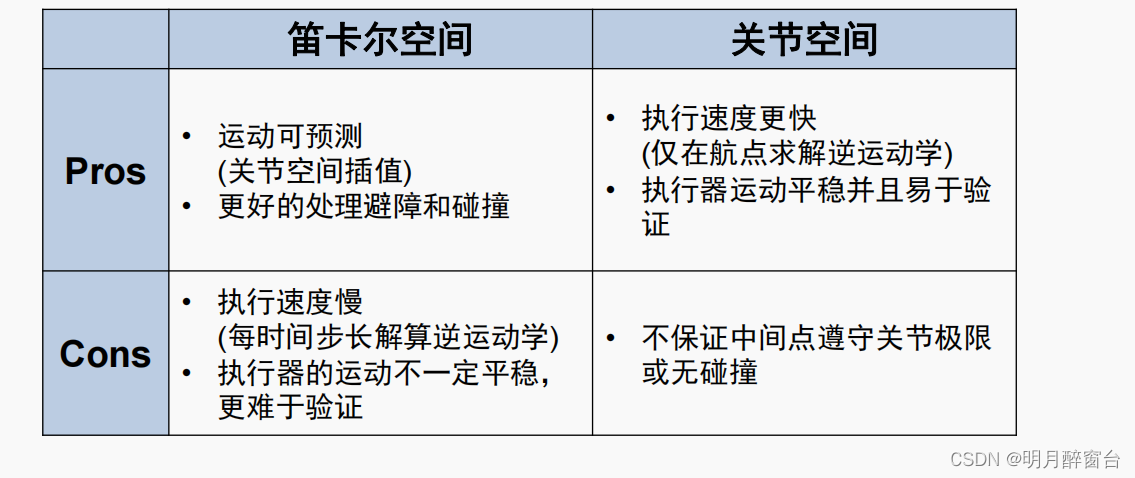
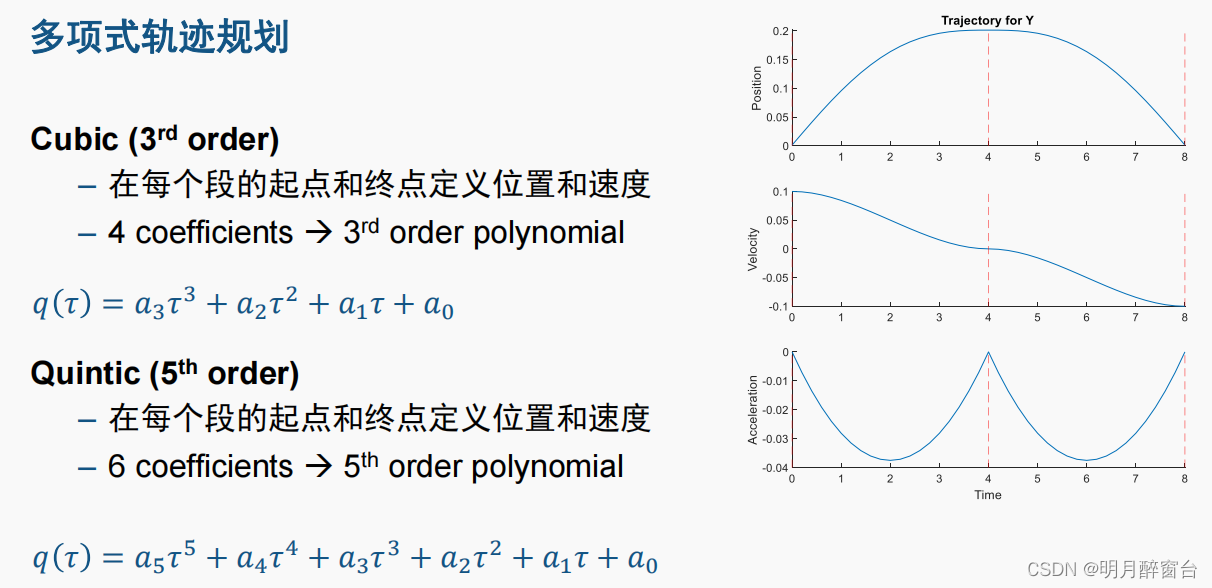
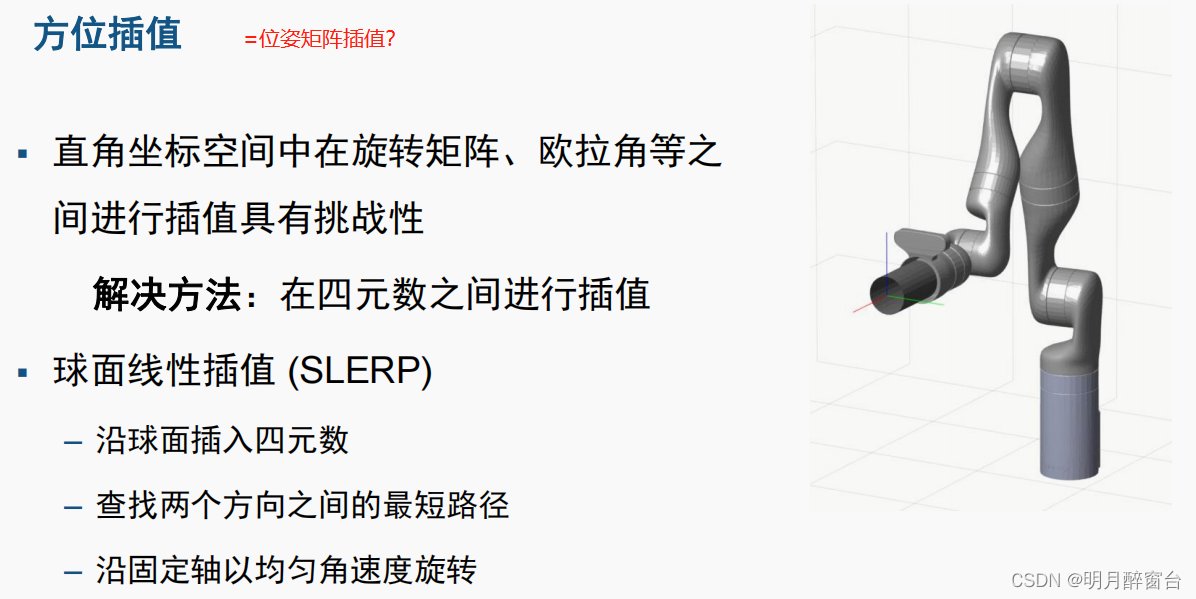
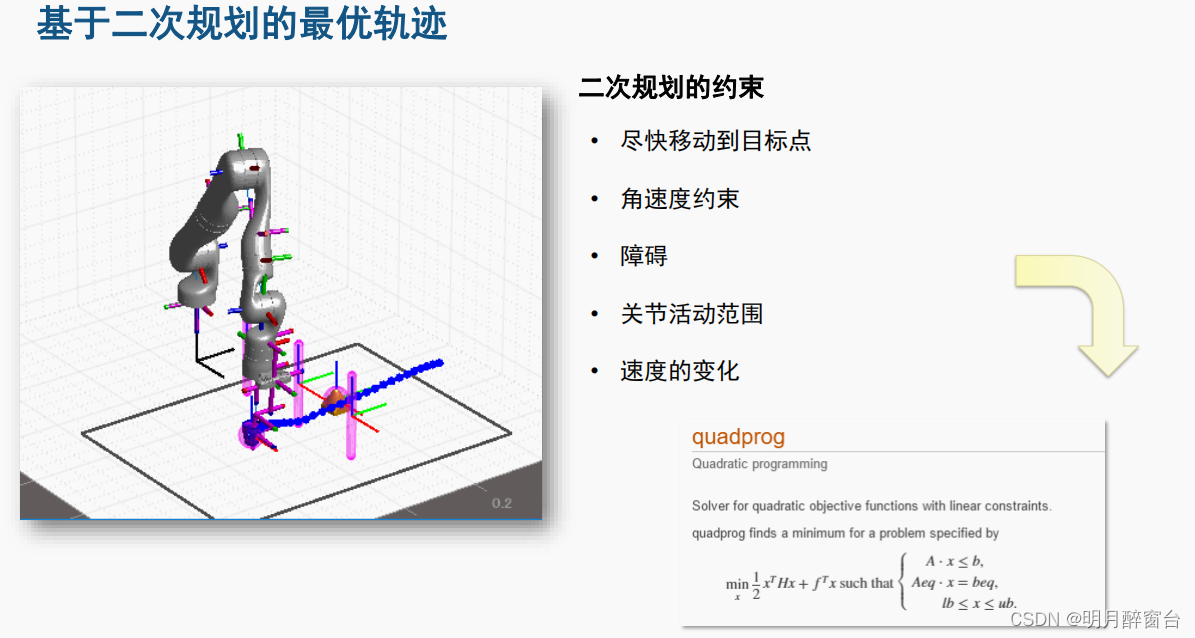
4.运动规划
其中,人控人控coefficients - 系数
作者:时尚








